Connecting a Parallax GPS module to the Arduino
(Adapted from Igor Gonzalez Martin's Spanish language tutorial here.)
This tutorial shows how to connect a Parallax GPS module to the Arduino, and how to use Arduino code to read information like date, time, location and satellites in view from the standard NMEA data streams that the module produces.
Hardware Connections:
The module connects to the Arduino through a 4800 bps TTL-level interface (8 data bits, no parity, 1 stop bit, non-inverted). Only four wires are needed to read the module's GPS data.
Note: if you are using an Andruino Uno, keep in mind that you can't use the GPS module at the same time as your computer is connected on the USB port.
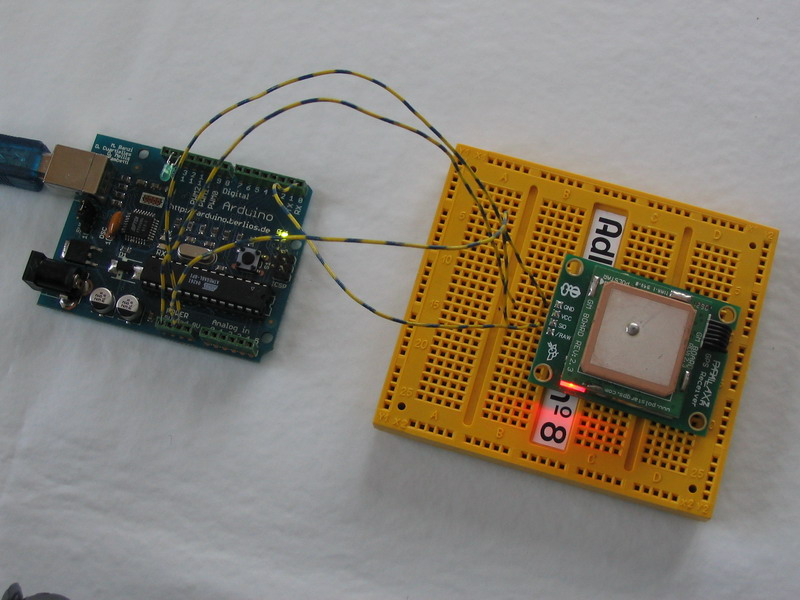
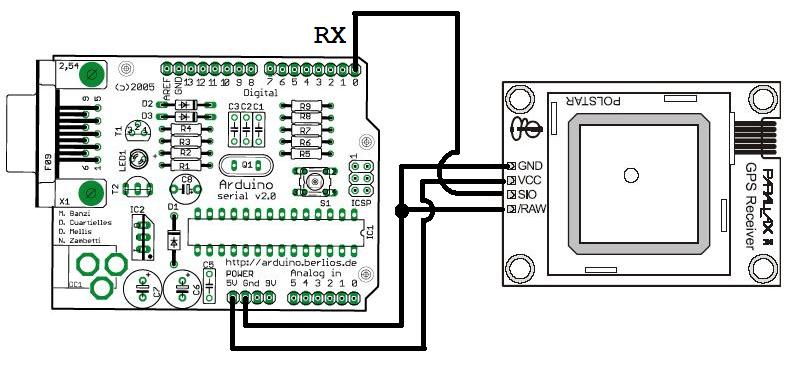
(photo and drawing by Igor Gonzalez Martin)
Understanding NMEA GPS strings
GPS modules typically put out a series of standard strings of information, under something called the National Marine Electronics Association (NMEA) protocol. More information on NMEA standard data strings can be found at this site
The tutorial code at the bottom of this page demonstrates how to decode and display the most common string, called $GPRMC. If all you need is date, time and position, you can to skip reading this, and just run the code below.
While you can write software to serially request other strings from the Parallax module, the following strings are automatically transmitted when the "/RAW" pin is pulled low.
- $GPGGA: Global Positioning System Fix Data
- $GPGSV: GPS satellites in view
- $GPGSA: GPS DOP and active satellites
- $GPRMC: Recommended minimum specific GPS/Transit data
Each of these sentences contains a wealth of data. For example, here are a few instances of the $GPRMC string, aka the "Recommended minimum specific GPS/Transit data" string:
eg1. $GPRMC,081836,A,3751.65,S,14507.36,E,000.0,360.0,130998,011.3,E*62 eg2. $GPRMC,225446,A,4916.45,N,12311.12,W,000.5,054.7,191194,020.3,E*68
225446 Time of fix 22:54:46 UTC
A Navigation receiver warning A = Valid position, V = Warning
4916.45,N Latitude 49 deg. 16.45 min. North
12311.12,W Longitude 123 deg. 11.12 min. West
000.5 Speed over ground, Knots
054.7 Course Made Good, degrees true
191194 UTC Date of fix, 19 November 1994
020.3,E Magnetic variation, 20.3 deg. East
*68 mandatory checksum
eg3. $GPRMC,220516,A,5133.82,N,00042.24,W,173.8,231.8,130694,004.2,W*70
1 2 3 4 5 6 7 8 9 10 11 12
1 220516 Time Stamp
2 A validity - A-ok, V-invalid
3 5133.82 current Latitude
4 N North/South
5 00042.24 current Longitude
6 W East/West
7 173.8 Speed in knots
8 231.8 True course
9 130694 Date Stamp
10 004.2 Variation
11 W East/West
12 *70 checksum
eg4. for NMEA 0183 version 3.00 active the Mode indicator field is added
$GPRMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,ddmmyy,x.x,a,m*hh
Field #
1 = UTC time of fix
2 = Data status (A=Valid position, V=navigation receiver warning)
3 = Latitude of fix
4 = N or S of longitude
5 = Longitude of fix
6 = E or W of longitude
7 = Speed over ground in knots
8 = Track made good in degrees True
9 = UTC date of fix
10 = Magnetic variation degrees (Easterly var. subtracts from true course)
11 = E or W of magnetic variation
12 = Mode indicator, (A=Autonomous, D=Differential, E=Estimated, N=Data not valid)
13 = Checksum
The Arduino Code
/*
Example code for connecting a Parallax GPS module to the Arduino
Igor Gonzalez Martin. 05-04-2007 igor.gonzalez.martin@gmail.com
English translation by djmatic 19-05-2007
Listen for the $GPRMC string and extract the GPS location data from this. Display the result in the Arduino's serial monitor.
*/
#include <string.h> #include <ctype.h>
int ledPin = 13; // LED test pin int rxPin = 0; // RX PIN int txPin = 1; // TX TX int byteGPS=-1; char linea[300] = ""; char comandoGPR[7] = "$GPRMC"; int cont=0; int bien=0; int conta=0; int indices[13];
void setup() {
pinMode(ledPin, OUTPUT); // Initialize LED pin
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
Serial.begin(4800);
for (int i=0;i<300;i++){ // Initialize a buffer for received data
linea[i]=' ';
}
}
void loop() {
digitalWrite(ledPin, HIGH);
byteGPS=Serial.read(); // Read a byte of the serial port
if (byteGPS == -1) { // See if the port is empty yet
delay(100);
} else {
// note: there is a potential buffer overflow here!
linea[conta]=byteGPS; // If there is serial port data, it is put in the buffer
conta++;
Serial.print(byteGPS, BYTE);
if (byteGPS==13){ // If the received byte is = to 13, end of transmission
// note: the actual end of transmission is <CR><LF> (i.e. 0x13 0x10)
digitalWrite(ledPin, LOW);
cont=0;
bien=0;
// The following for loop starts at 1, because this code is clowny and the first byte is the <LF> (0x10) from the previous transmission.
for (int i=1;i<7;i++){ // Verifies if the received command starts with $GPR
if (linea[i]==comandoGPR[i-1]){
bien++;
}
}
if(bien==6){ // If yes, continue and process the data
for (int i=0;i<300;i++){
if (linea[i]==','){ // check for the position of the "," separator
// note: again, there is a potential buffer overflow here!
indices[cont]=i;
cont++;
}
if (linea[i]=='*'){ // ... and the "*"
indices[12]=i;
cont++;
}
}
Serial.println(""); // ... and write to the serial port
Serial.println("");
Serial.println("---------------");
for (int i=0;i<12;i++){
switch(i){
case 0 :Serial.print("Time in UTC (HhMmSs): ");break;
case 1 :Serial.print("Status (A=OK,V=KO): ");break;
case 2 :Serial.print("Latitude: ");break;
case 3 :Serial.print("Direction (N/S): ");break;
case 4 :Serial.print("Longitude: ");break;
case 5 :Serial.print("Direction (E/W): ");break;
case 6 :Serial.print("Velocity in knots: ");break;
case 7 :Serial.print("Heading in degrees: ");break;
case 8 :Serial.print("Date UTC (DdMmAa): ");break;
case 9 :Serial.print("Magnetic degrees: ");break;
case 10 :Serial.print("(E/W): ");break;
case 11 :Serial.print("Mode: ");break;
case 12 :Serial.print("Checksum: ");break;
}
for (int j=indices[i];j<(indices[i+1]-1);j++){
Serial.print(linea[j+1]);
}
Serial.println("");
}
Serial.println("---------------");
}
conta=0; // Reset the buffer
for (int i=0;i<300;i++){ //
linea[i]=' ';
}
}
}
}
If the above code works, in the serial monitor window you should see the following:
Valid position (status is A):
... ...
$GPGGA,154653,4428.2011,N,00440.5161,W,0,00,,-00044.7,M,051.6,M,,*6C $GPGSA,A,1,,,,,,,,,,,,,,,*1E $GPGSV,3,1,10,02,50,290,003,10,25,24,045,35,27,56,145,00,,,,,,,,*78 $GPRMC,154653,V,4428.2011,N,00440.5161,W,000.5,342.8,050407,,,N*7F
--------------- Time in UTC (HhMmSs): 154653 Status (A=OK,V=KO): V Latitude: 4428.2011 Direction (N/S): N Longitude: 00440.5161 Direction (E/W): W Speed in knots: 000.5 Direction in degrees: 342.8 Date in UTC (DdMmAa): 050407 Magnetic variation: Variation (E/W): Mode: A
---------------
... ...
B: Valid positon: The GPS light shines steadily.
... ...
$GPGGA,154654,4428.2011,N,00440.5161,W,0,00,,-00044.7,M,051.6,M,,*6B $GPGSA,A,1,,,,,,,,,,,,,,,*1E $GPGSV,3,1,10,02,50,290,00 $GPGGA,154655,4328.1874,N,00340.5185,W,1,03,08.5,-00044.7,M,051.6,M,,*79 $GPGSA,A,2,13,23,25,,,,,,,,,,08.5,08.5,00.9*0E $GPGSV,3,1,10,02,50,290,26,04,60,210,26,08,33,173,29,10,21,296,00*7E $GPGSV,3,2,10,13,58,044,34,16,03,035,00,20,02,109,00,23,26,057,34*7B $GPGSV,3,3,10,25,24,045,35,27,56,145,27,,,,,,,,*7D $GPRMC,154655,A,4428.1874,N,00440.5185,W,000.7,000.0,050407,,,A*6C
--------------- Time in UTC (HhMmSs): 154655 Status (A=OK,V=KO): A Latitude: 4428.1874 Direction (N/S): N Longitude: 00440.5185 Direction (E/W): W Speed in Knots: 000.7 Heading in degrees: 000.0 Date in UTC (DdMmAa): 050407 Magnetic variation: Variation (E/W): Mode: A ---------------
... ...
Alternate code
You can see another implementation of a GPS at http://quaxio.com/arduino_gps/